Basic-ie-picard¶
Model problem¶
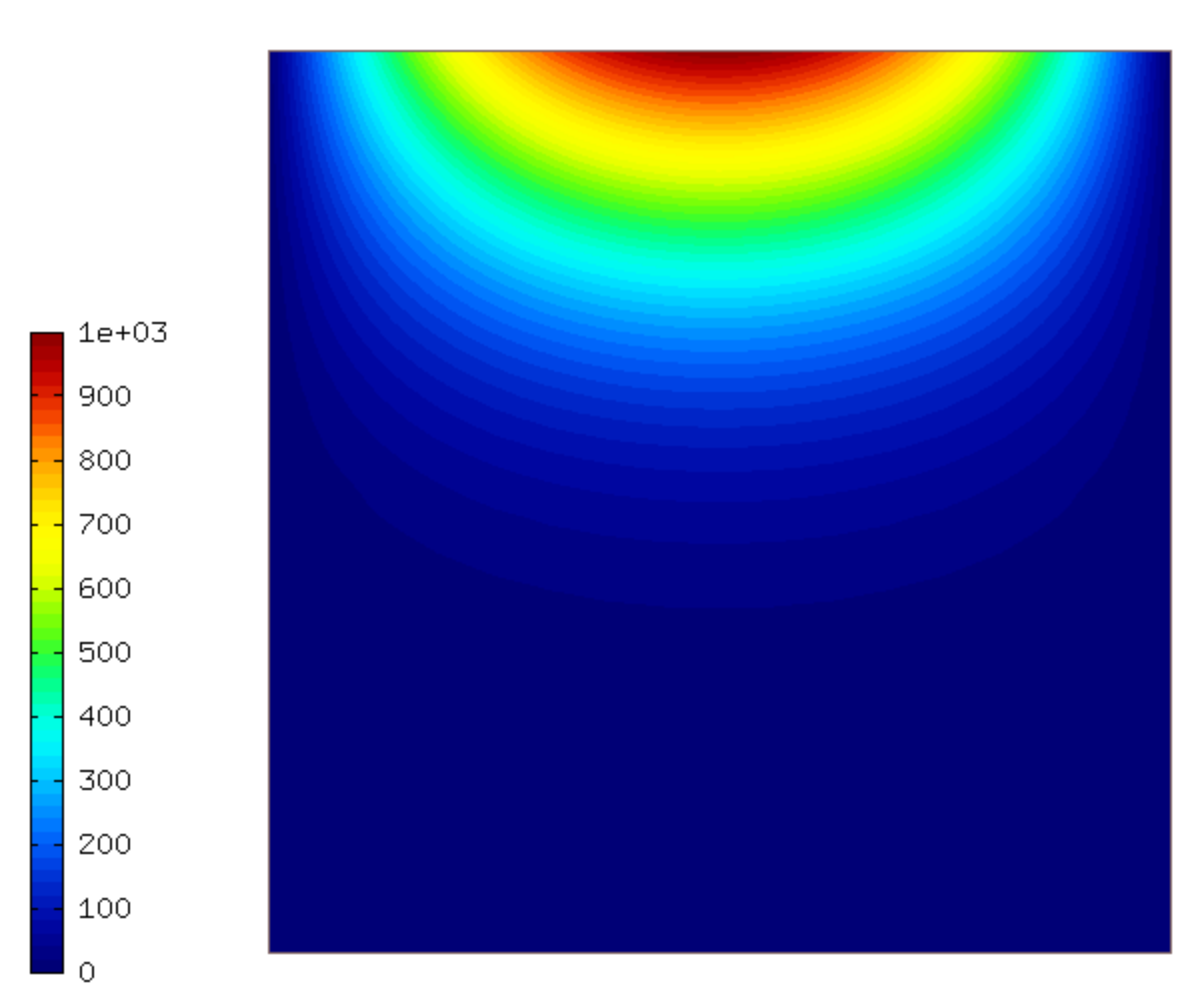
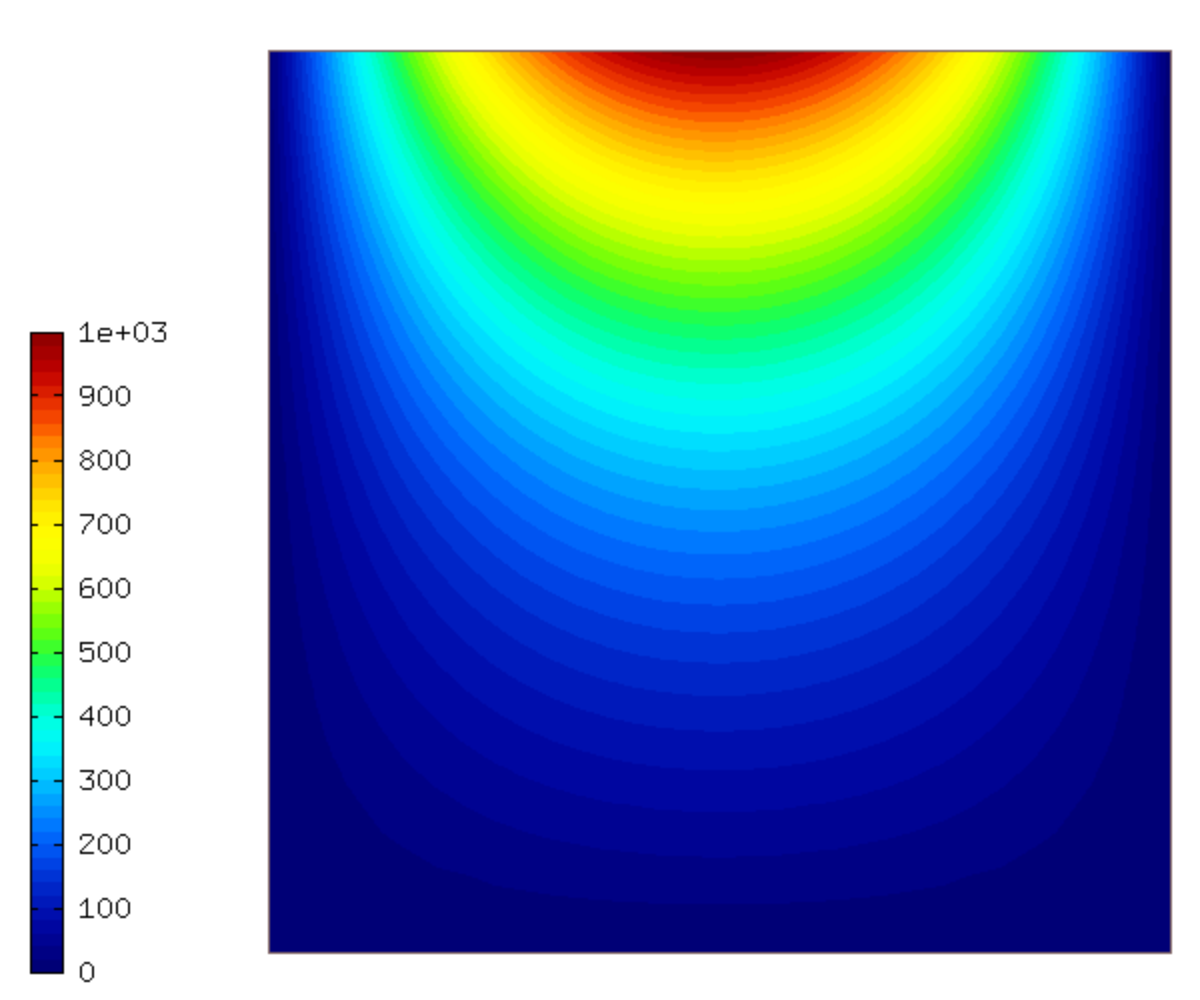
This example is similar to basic-ie-newton except it uses the Picard’s method in each time step (not Newton’s method).
We assume the time-dependent Richard’s equation
(1)
where  and
and  are non-differentiable and thus in some cases the Newton’s method has convergence problems.
For this reason, the Picard’s method is a popular approach. If Picards is used, then Andersson acceleration should be employed.
are non-differentiable and thus in some cases the Newton’s method has convergence problems.
For this reason, the Picard’s method is a popular approach. If Picards is used, then Andersson acceleration should be employed.
equipped with a Dirichlet, given by the initial condition.

The pressure head ‘h’ is between -1000 and 0. For convenience, we increase it by an offset H_OFFSET = 1000. In this way we can start from a zero coefficient vector.
Weak formulation¶
The corresponding weak formulation reads

Here  refers to time steps and
refers to time steps and  to Picard’s iterations within one time step.
to Picard’s iterations within one time step.
Defining weak forms¶
The weak formulation is a combination of custom Jacobian and Residual weak forms:
CustomWeakFormRichardsIEPicard::CustomWeakFormRichardsIEPicard(double time_step, Solution* h_time_prev, Solution* h_iter_prev) : WeakForm<double>(1)
{
// Jacobian.
CustomJacobian* matrix_form = new CustomJacobian(0, 0, time_step);
matrix_form->ext.push_back(h_time_prev);
matrix_form->ext.push_back(h_iter_prev);
add_matrix_form(matrix_form);
// Residual.
CustomResidual* vector_form = new CustomResidual(0, time_step);
vector_form->ext.push_back(h_time_prev);
vector_form->ext.push_back(h_iter_prev);
add_vector_form(vector_form);
}